Ros Package Template
Ros package template - This tutorial introduces ros graph concepts and discusses the use of roscore, rosnode, and rosrun. A ros driver for orbbec 3d cameras. This package supports ros kinetic, melodic and noetic distributions. Please refer directly to ros wiki.; Robot_localization is a package of nonlinear state estimation nodes. To open a rosbuild ros package code as a project, use open file or project and select the cmakelists.txt of your ros package. The package was developed by charles river analytics, inc. We would like to show you a description here but the site won’t allow us. Please ask questions on answers.ros.org. The template could for example contain the license header, author name, and include guards (in case of a header file).
This tutorial covers the toolchain to build a package.

ROS put out a package pickup reminder for their residents Take this
Please ask questions on answers.ros.org. To open a rosbuild ros package code as a project, use open file or project and select the cmakelists.txt of your ros package. The template could for example contain the license header, author name, and include guards (in case of a header file).
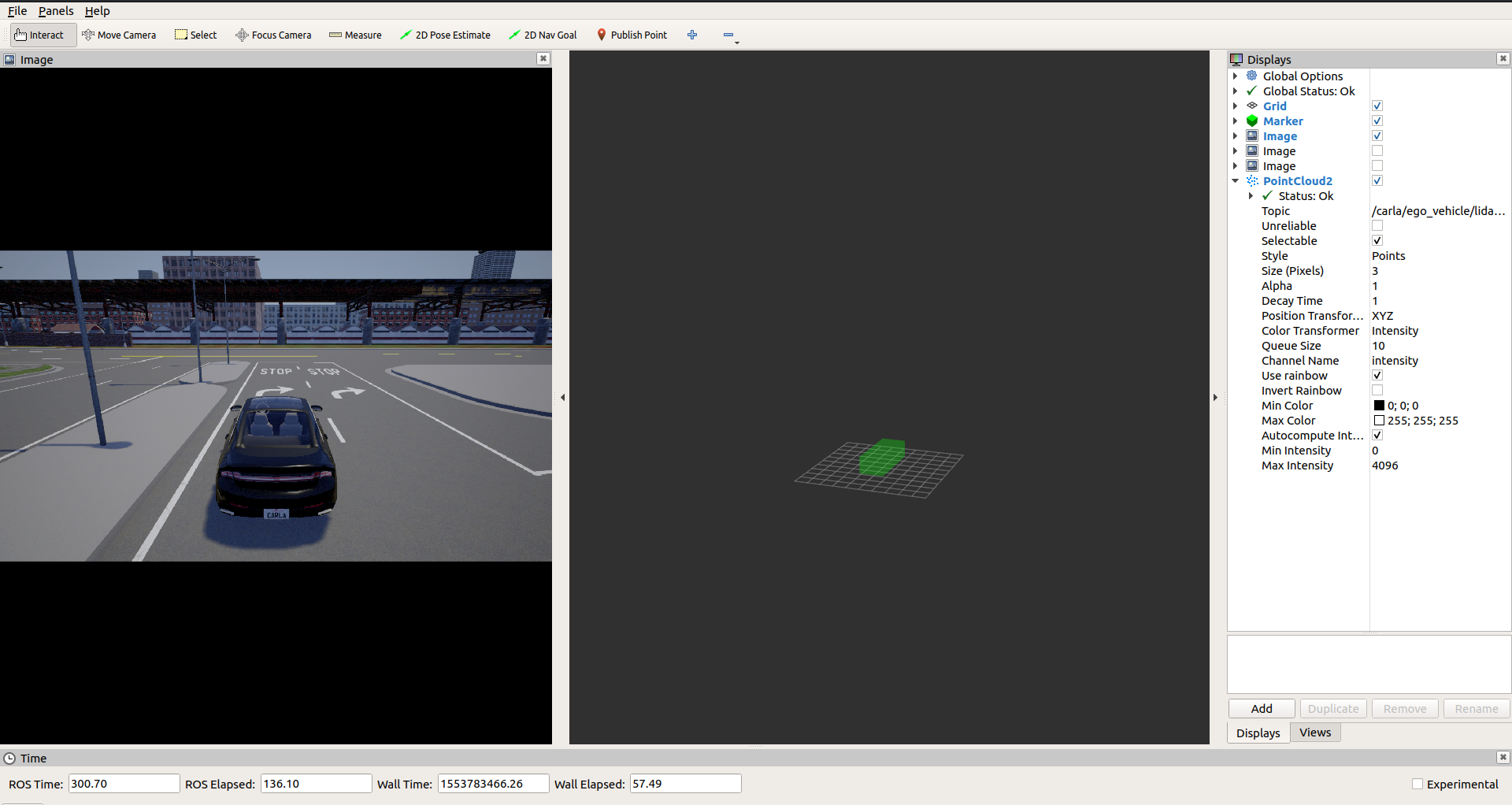
ROSCARLA Integration > How to use ROS Bridge package
This package supports ros kinetic, melodic and noetic distributions. A ros driver for orbbec 3d cameras. Please refer directly to ros wiki.;
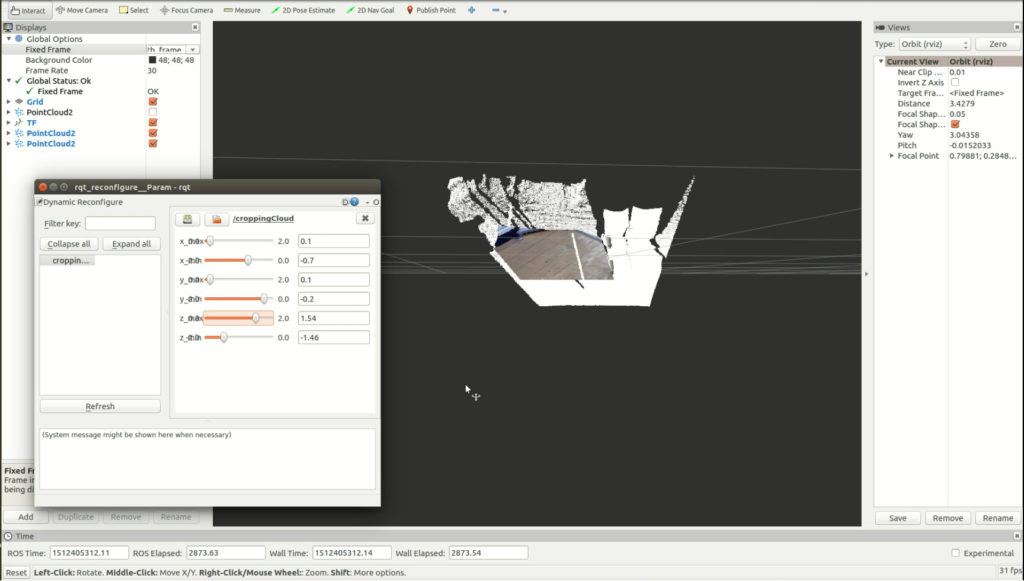
A GUI ROSpackage for cropping pcl pointcloud with dynamic reconfigure
This tutorial covers the toolchain to build a package. This package supports ros kinetic, melodic and noetic distributions. To open a rosbuild ros package code as a project, use open file or project and select the cmakelists.txt of your ros package.
![[Tutorial] How to build a GUI in ROS with Qt / C++? CasperWin 博客园](https://images2015.cnblogs.com/blog/1001667/201612/1001667-20161221031846698-1640277134.png)
[Tutorial] How to build a GUI in ROS with Qt / C++? CasperWin 博客园
This package supports ros kinetic, melodic and noetic distributions. The package was developed by charles river analytics, inc. This tutorial introduces ros graph concepts and discusses the use of roscore, rosnode, and rosrun.
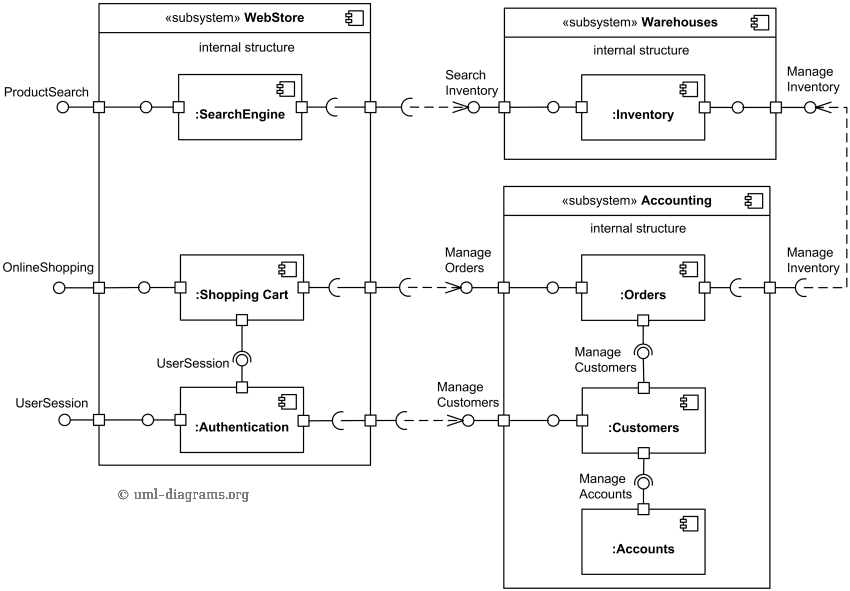
Contoh Interface Database Contoh Ros
Please ask questions on answers.ros.org. This tutorial covers the toolchain to build a package. The package was developed by charles river analytics, inc.
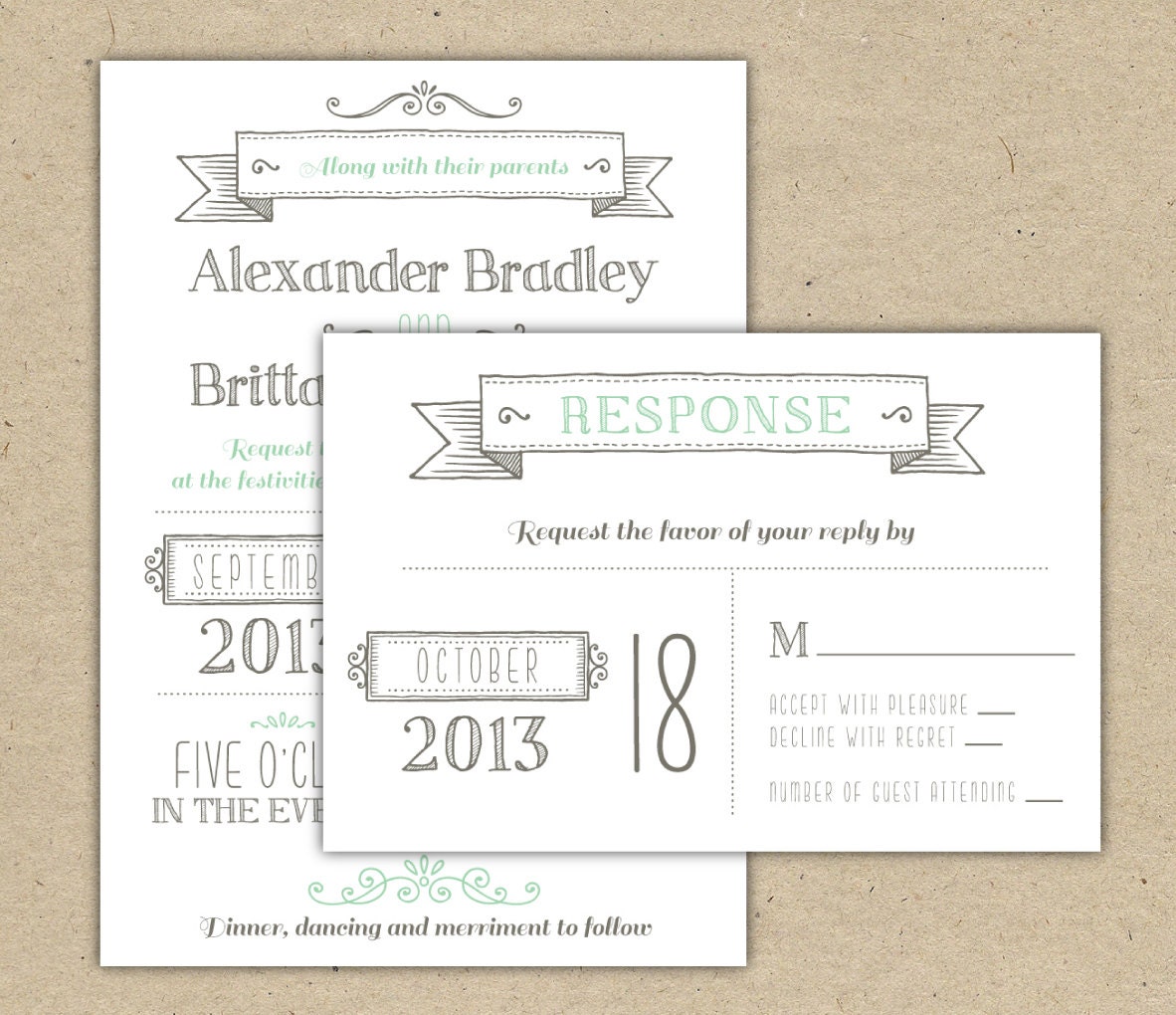
Wedding Invitation 1041 SAMPLE. Modern invitation template.
A ros driver for orbbec 3d cameras. We would like to show you a description here but the site won’t allow us. Please ask questions on answers.ros.org.
Overleaf Beamer Template Metropolis The Best Picture Of Beam
To open a rosbuild ros package code as a project, use open file or project and select the cmakelists.txt of your ros package. Please ask questions on answers.ros.org. This package supports ros kinetic, melodic and noetic distributions.
Radio advertising
This package supports ros kinetic, melodic and noetic distributions. To open a rosbuild ros package code as a project, use open file or project and select the cmakelists.txt of your ros package. The template could for example contain the license header, author name, and include guards (in case of a header file).
The template could for example contain the license header, author name, and include guards (in case of a header file). This tutorial introduces ros graph concepts and discusses the use of roscore, rosnode, and rosrun. Please refer directly to ros wiki.; This package supports ros kinetic, melodic and noetic distributions. A ros driver for orbbec 3d cameras. We would like to show you a description here but the site won’t allow us. Robot_localization is a package of nonlinear state estimation nodes. Please ask questions on answers.ros.org. The package was developed by charles river analytics, inc. To open a rosbuild ros package code as a project, use open file or project and select the cmakelists.txt of your ros package.
This tutorial covers the toolchain to build a package.